
This Robot Hummingbird Is Almost as Agile as the Real Thing
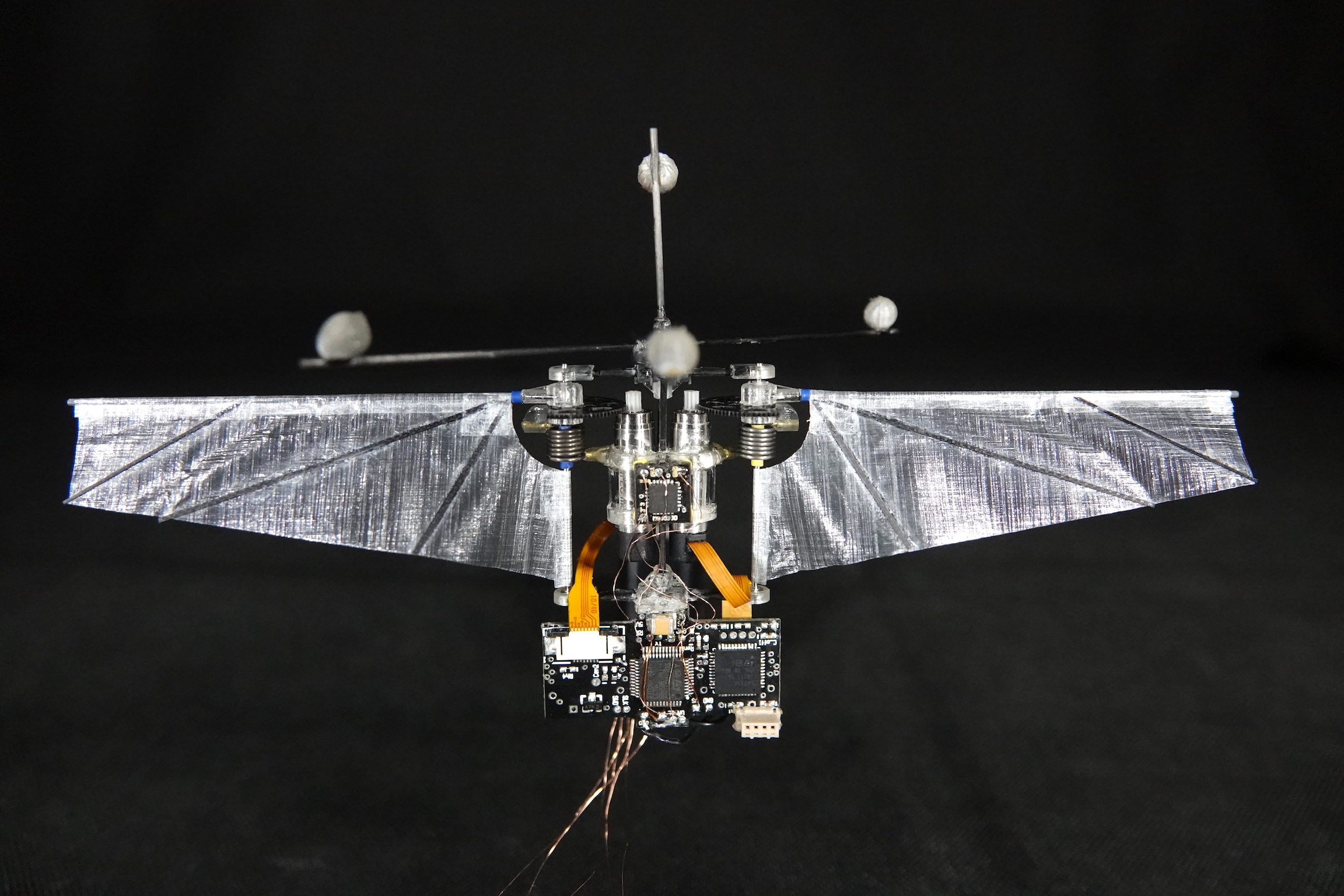
The first thing to point out here is that the robot is both tethered for power and control, and that it’s using an external localization system to keep itself stable in mid-air. We’re less put off by this than we might be otherwise, though, because the robot is able to lift more than twice its own weight, meaning that the additional hardware that it’ll take to go fully autonomous (with onboard power, sensing, computing, and communications) is achievable using existing, available technology.
If you look closely, you can see in some of the slow motion clips that each of the robot’s wings is controlled by its own motor, which is changing its direction more than 30 times per second. These decoupled wings allow the robot to take advantage of the same flapping dynamics that real hummingbirds do, with small differences in motion between the wings resulting in dramatic maneuvers. It’s also these direct-drive motors that allow the wings to be used as sensors. The motors are able to detect changes in wing kinematics, like when ground effect adds lift or when the wing encounters an obstacle, and then react accordingly, which includes compensating for wing damage.
The idea of using wings as both sensors and actuators hasn’t been studied all that much, probably because it’s very hard to design a robot this small that can survive repeatedly crashing into things. In the past, we’ve covered quadrotors enclosed in protective cages that can tolerate collisions, but wings tend to be much more fragile.
Purdue’s robot just accepts the fact that damage is going to happen, and makes sure that the control system can handle it, which opens up this new way of reliably navigating through even very tight spaces that doesn’t require any additional sensing hardware.
Of course, Purdue’s hummingbird isn’t the only flapping-wing robot out there, and it’s not even the only hummingbird-looking hummingbird robot out there. We asked Xinyan Deng, an associate professor of mechanical engineering at Purdue, to explain how her robot compares to some of the other robots that we’ve seen before, and also to real birds and insects.
IEEE Spectrum: How does your robot compare to other small-scale robots that use flapping wings in both design and performance, including small-scale fliers like RoboBee, larger fliers like DelFly, and to AeroVironment’s Nano Hummingbird?
Xinyan Deng: Compared to RoboBee, both are at-scale robotic vehicles to their natural counterparts. The differences are: We use DC motors instead of piezoelectric actuators that require very high voltage input; and our robot generates enough lift for additional payload and sensors, meaning that our design can achieve full autonomy; also, the wings, mechanisms and motors are more robust with a longer life cycle.
DelFly employs a double wing design to generate lift through clap-and-fling mechanism (where the trailing edge of the wings come together and peel off). Its wings are driven by a motor with fixed-wing kinematics—this design only generates thrust in a fixed direction with each wing pair, therefore they need either a tail, or to separate the two wings and use differential thrust controlled by additional servos. Our design does not have limitation on wing kinematics and can achieve arbitrary wing trajectory within the stroke plane, enabling better maneuverability.
Nano Hummingbird was the first flapping-wing robot that was able to hover untethered with on-board electronics, and it inspired many similar platforms. Despite its morphological similarity to real hummingbird, its employs a “helicopter-like” control scheme. It uses one motor to drive the coupled wings for power stroke, along with a transmission mechanism which generates fixed-wing kinematics within the stroke plane. It then employs three additional servo motors to drive a swashplate-like mechanism to modulate additional wing kinematics for flight control, similar to helicopters.
What is the goal of attempting extreme maneuvers with the robot? How will the experience that you have gained make the robot more useful or practical?
Ultimately we want to achieve the same performance as hummingbirds or even better. The extreme maneuver we attempted represents the maximal maneuvering performance of animal fliers. We have demonstrated the capability of our robot design, and that a truly bio-mimetic robot has the potential to perform like a real hummingbird. With only limited actuation and by controlling the stroke angles alone, it can already achieve a similar behavior to that of real hummingbird—imagine what a robot with full wing actuation (wing rotation and deviation) can perform. The ultimate goal is to enable the robot to “dance” and interact with other robots like real hummingbirds.
Flapping-wing hummingbird or insect robots can be employed in a variety of applications such as search and rescue, environmental monitoring, entertainment, etc. They are also suitable for tight spaces with obstructions as no components would get entangled. With a bio-mimicking morphology, they are friendly and less intrusive flying vehicles while being fast and agile. They can be good toys due to their friendly morphology and safety (as these flexible wings won’t hurt human even at high frequency flapping), making them ideal flying robots to co-exist with human in future smart cities.
How important is a hummingbird’s tail to its agility, and is that something you have any reason to add to your robot?
The tail of a hummingbird is highly dynamic and maneuverable, and the bird can articulate its tail and flare out the feathers during elaborate motions such as breaking and turning. There is a range of biological literature on the function of tails in hummingbird flight. Our robot does not have a tail and use only the two wings for aerodynamic lift and flight control, similar to most insects, which do not have tail as a control surface. Adding a tail would only be necessary to enhance the performance for certain maneuvers where two wings are not sufficient. We do not have a plan for that in the near future.
Can you talk about what the resiliency of the robot’s wings implies for detecting obstacles and navigating around them?
Wings of insects are not repairable and can tolerate extensive wear and tear, area loss, morphological asymmetry, etc. over their lifespan. Similarly, for practical reasons, flapping wing robots also need to be able to tolerate system uncertainties such as mechanical and morphological imperfections due to fabrication limitations, wing wear and tear, and environmental disturbances due to wind gusts and physical obstacles.
The way to realize system resilience was achieved through mechanical design, system optimization and flight control algorithms, where we tested a variety of nonlinear and adaptive control algorithms so that the flight performance can adapt to system uncertainties due to mechanical damage and external disturbances such as obstacles and gusts.
The resilience of the wing makes it a great candidate to navigate its surroundings without worrying about bumping into obstacles. In fact, it can use its wings to “feel” its way through, inspired by the somatosensory of animals. We use the motor current feedback to sense the load changes and therefore sensing the ground (through the aerodynamic ground effect) and the wall (through wing touching).
With the payload that your robot has, do you have a sense of when it may be able to fly untethered? What kind of sensing or computing would you like to include for it to fly and navigate outside of a motion capture environment?
We have demonstrated sufficient payload to carry battery and additional sensors. Currently, we can have attitude stabilization without the motion-capture system. To achieve full autonomy outside of the motion-capture environment, we will need an additional position-feedback sensor such as camera, optical-flow sensor, Bluetooth, or GPS. We are currently working on adding a battery to realize untethered flight, and further combining conventional control with AI algorithms such as reinforcement learning/imitation learning algorithms to implement on the robot, making it a truly intelligent bio-inspired robot.
Professor Xinyan Deng and her students will be presenting three (!) papers on their robotic hummingbird at ICRA in Montreal in just a few weeks, but you can read preprints right now at the links below.
“Learning Extreme Hummingbird Maneuvers on Flapping Wing Robots”
“Acting Is Seeing: Navigating Tight Space Using Flapping Wings”
“Flappy Hummingbird: An Open Source Dynamic Simulation of Flapping Wing Robots and Animals”
[ Purdue ]
Leave a Reply