Watch the HyQReal Robot Pull an Airplane
HyQReal is 1.33 m long and 90 cm tall, and its weight is 130kg considering hydraulics and batteries onboard. The robot is protected by an aluminum roll cage and a skin made of Kevlar, glass fiber and plastic. The robot has custom-made rubber feet for traction when the going gets tough. The robot has two computers on board, one for vision, the other for control.
The video, while impressive, doesn’t give a very clear picture of the overall capabilities of the robot (and neither does that little snippet from the press release, which contains the entirety of the technical info). Fortunately, Claudio Semini gave a workshop talk at ICRA today where he introduced HyQReal in much more detail. Here’s a slide showing all the specs:
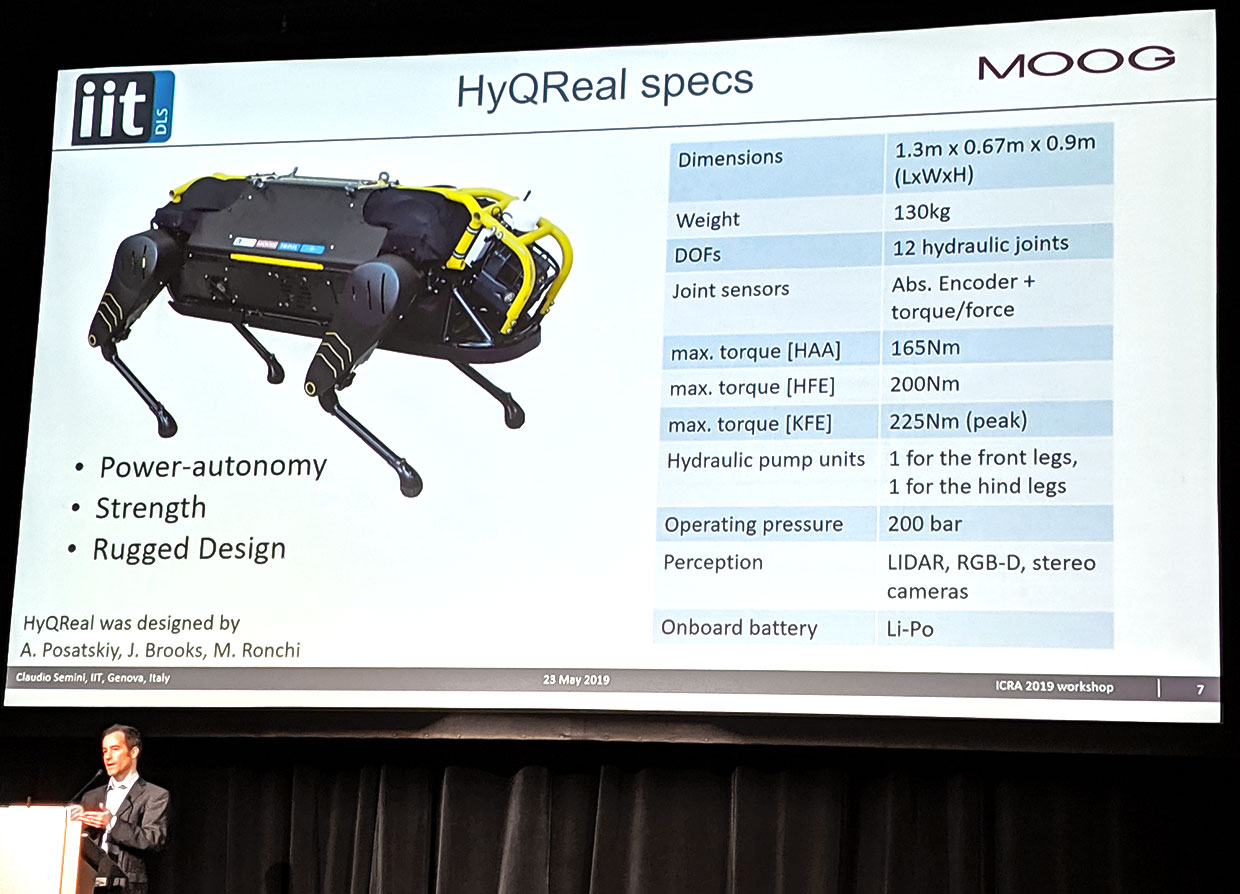
IIT partnered with Moog on the hydraulics, using their Integrated Smart Actuators, each with a 3D-printed titanium body that contains all the sensors, electronics, and fluid routing. There are two independent hydraulic pumps, one powering the front legs, and the other powering the hind legs. The battery (which weighs 15kg) should be good for about two hours, although IIT hasn’t yet done endurance testing. Since the actuators are mostly sealed up, HyQReal is water- and dust-resistant, able to keep moving while being sprayed with water or having sand dumped all over it.
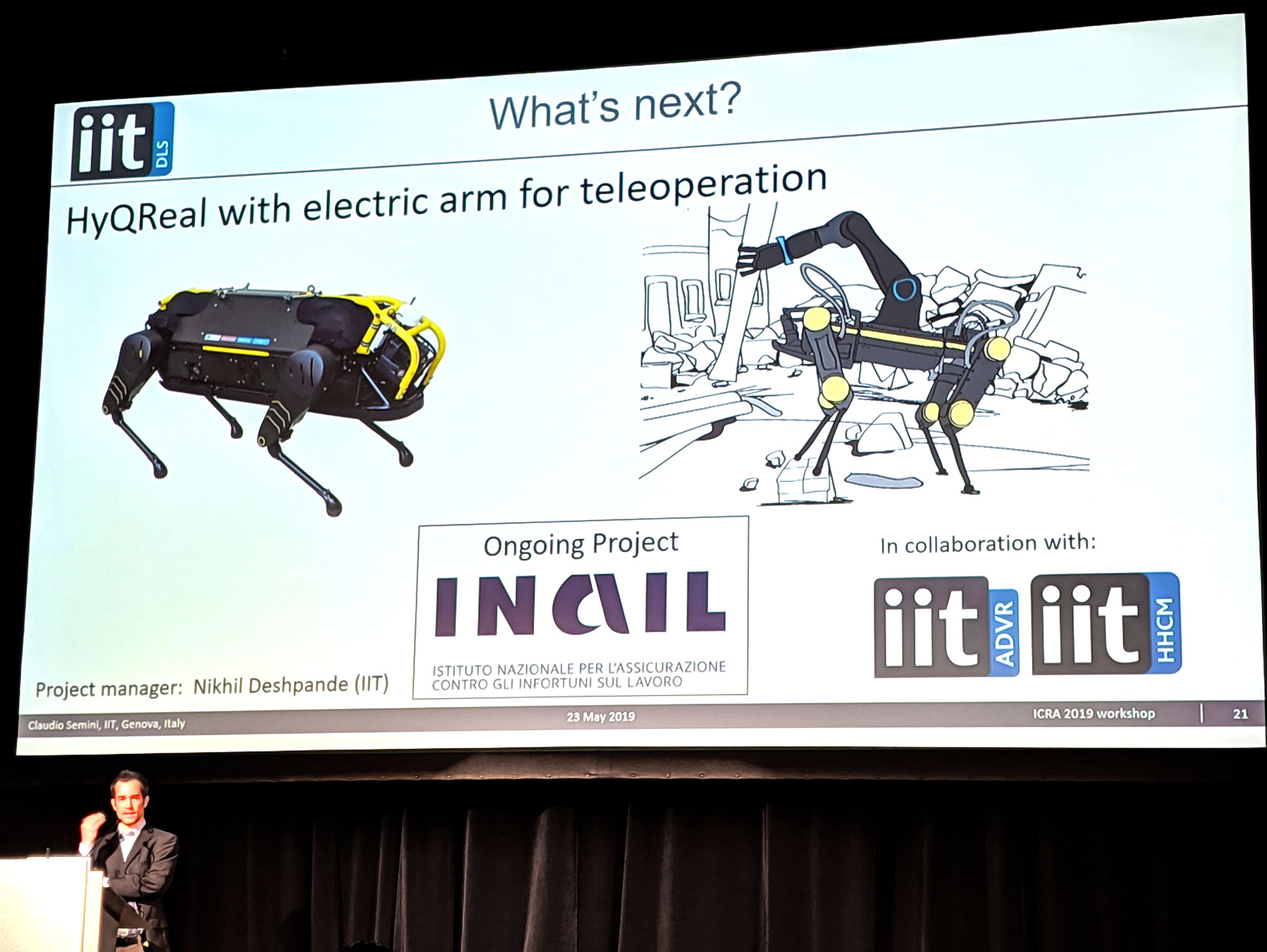
At the ICRA workshop, we saw some brief video of the robot trotting, as well as lying down and standing up again. We’re told that it should be able to autonomously recover after it falls, but IIT hasn’t had time to test that either. HyQReal is very, very new, so there’s a lot of stuff that the researchers simply haven’t had a chance to figure out yet. They also haven’t had a chance to put a beefy electric arm on it, which is part of the long-term plan to make the robot useful:
Pulling an airplane isn’t likely to be HyQReal’s primary job— very broadly, it’s been developed to “support humans in emergency scenarios,” and should be ideal for “disaster response, agriculture, decommissioning, and inspection.” It’s still very much a research robot at the moment, although based on all of the work that IIT has done on the previous version of HyQ, we’re hoping to see some rapid progress over the next few months.
[ IIT DLS ]
Leave a Reply