
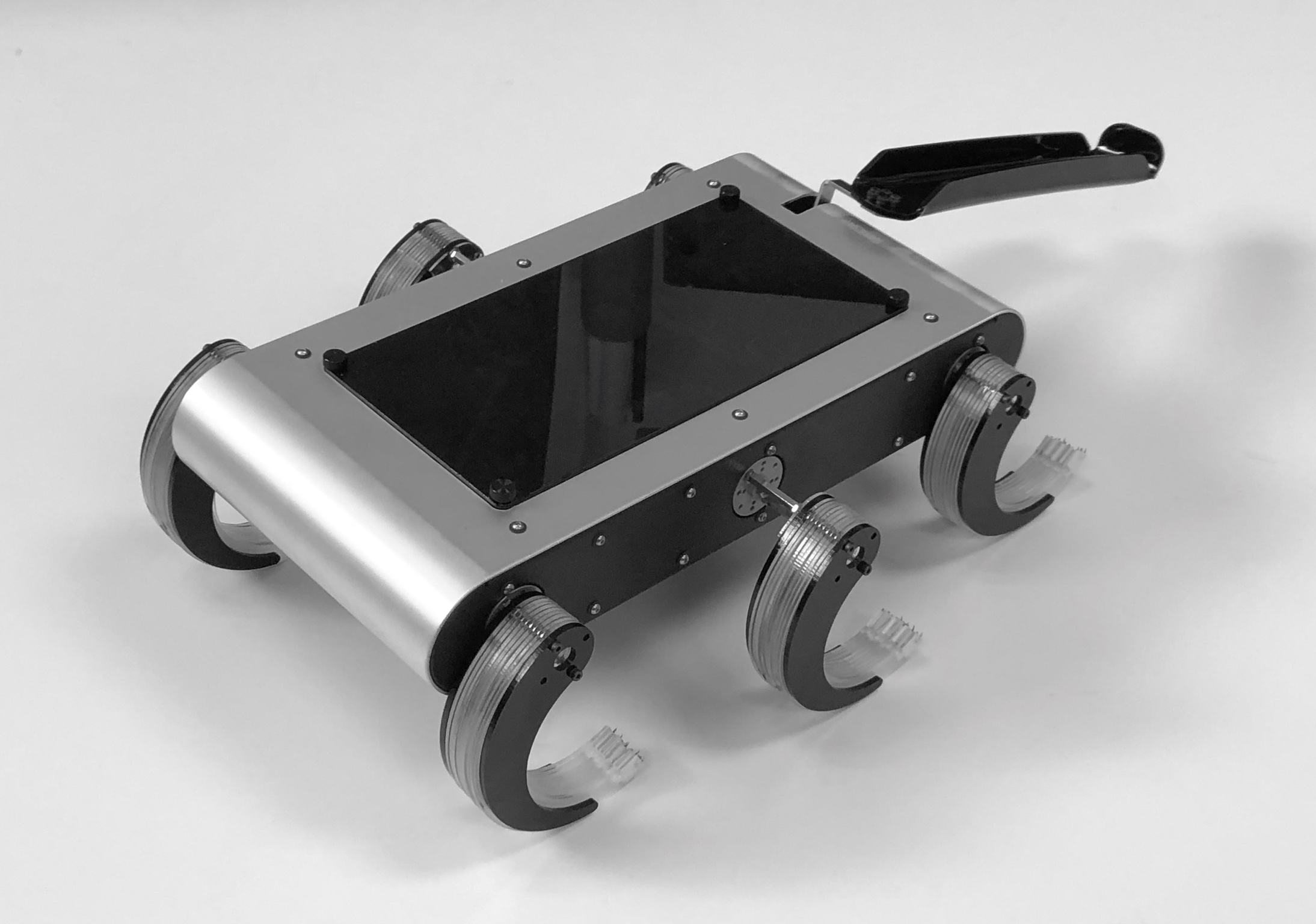
T-RHex Is a Hexapod Robot With Microspines on Its Feet
T-RHex’s toes are called microspines, and we’ve seen them in all kinds of robots. The most famous of these is probably JPL’s LEMUR IIB (which wins on sheer microspine volume), although the concept goes back at least 15 years to Stanford’s SpinyBot. Robots that use microspines to climb tend to be fairly methodical at it, since the microspines have to be engaged and disengaged with care, limiting their non-climbing mobility.
T-RHex manages to perform many of the same sorts of climbing and hanging maneuvers without losing RHex’s ability for quick, efficient wheel-leg (wheg) locomotion.
If you look closely at T-RHex walking in the video, you’ll notice that in its normal forward gait, it’s sort of walking on its ankles, rather than its toes. This means that the microspines aren’t engaged most of the time, so that the robot can use its regular wheg motion to get around. To engage the microspines, the robot moves its whegs backwards, meaning that its tail is arguably coming out of its head. But since all of T-RHex’s capability is mechanical in nature and it has no active sensors, it doesn’t really need a head, so that’s fine.
The highest climbable slope that T-RHex could manage was 55 degrees, meaning that it can’t, yet, conquer vertical walls. The researchers were most surprised by the robot’s ability to cling to surfaces, where it was perfectly happy to hang out on a slope of 135 degrees, which is a 45 degree overhang (!). I have no idea how it would ever reach that kind of position on its own, but it’s nice to know that if it ever does, its spines will keep doing their job.
For more details about the project, we spoke with Team ScienceParrot member (and CMU PhD student) Catherine Pavlov via email.
IEEE Spectrum: We’re used to seeing RHex with compliant, springy legs—how do the new legs affect T-RHex’s mobility?
Catherine Pavlov: There’s some compliance in the legs, though not as much as RHex—this is driven by the use of acrylic, which was chosen for budget/manufacturing reasons. Matching the compliance of RHex with acrylic would have made the tines too weak (since often only a few hold the load of the robot during climbing). It definitely means you can’t use energy storage in the legs the way RHex does, for example when pronking. T-RHex is probably more limited by motor speed in terms of mobility though. We were using some borrowed Dynamixels that didn’t allow for good positioning at high speeds.
How did you design the climbing gait? Why not use the middle legs, and why is the tail necessary?
The gait was a lot of hand-tuning and trial-and-error. We wanted a left/right symmetric gait to enable load sharing among more spines and prevent out-of-plane twisting of the legs. When using all three pairs, you have to have very accurate angular positioning or one leg pair gets pushed off the wall. Since two legs should be able to hold the full robot gait, using the middle legs was hurting more than it was helping, with the middle legs sometimes pushing the rear ones off of the wall.
The tail is needed to prevent the robot from tipping backward and “sitting” on the wall. During static testing we saw the robot tip backward, disengaging the front legs, at around 35 degrees incline. The tail allows us to load the front legs, even when they’re at a shallow angle to the surface. The climbing gait we designed uses the tail to allow the rear legs to fully recirculate without the robot tipping backward.

What prevents T-RHex from climbing even steeper surfaces?
There are a few limiting factors. One is that the tines of the legs break pretty easily. I think we also need a lighter platform to get fully vertical—we’re going to look at MiniRHex for future work. We’re also not convinced our gait is the best it can be, we can probably get marginal improvements with more tuning, which might be enough.
Can the microspines assist with more dynamic maneuvers?
Dynamic climbing maneuvers? I think that would only be possible on surfaces with very good surface adhesion and very good surface strength, but it’s certainly theoretically possible. The current instance of T-RHex would definitely break if you tried to wall jump though.
What are you working on next?
Our main target is exploring the space of materials for leg fabrication, such as fiberglass, PLA, urethanes, and maybe metallic glass. We think there’s a lot of room for improvement in the leg material and geometry. We’d also like to see MiniRHex equipped with microspines, which will require legs about half the scale of what we built for T-RHex. Longer-term improvements would be the addition of sensors e.g. for wall detection, and a reliable floor-to-wall transition and dynamic gait transitions.
[ T-RHex ]
1 2
Leave a Reply